TAG Event – Visualizations
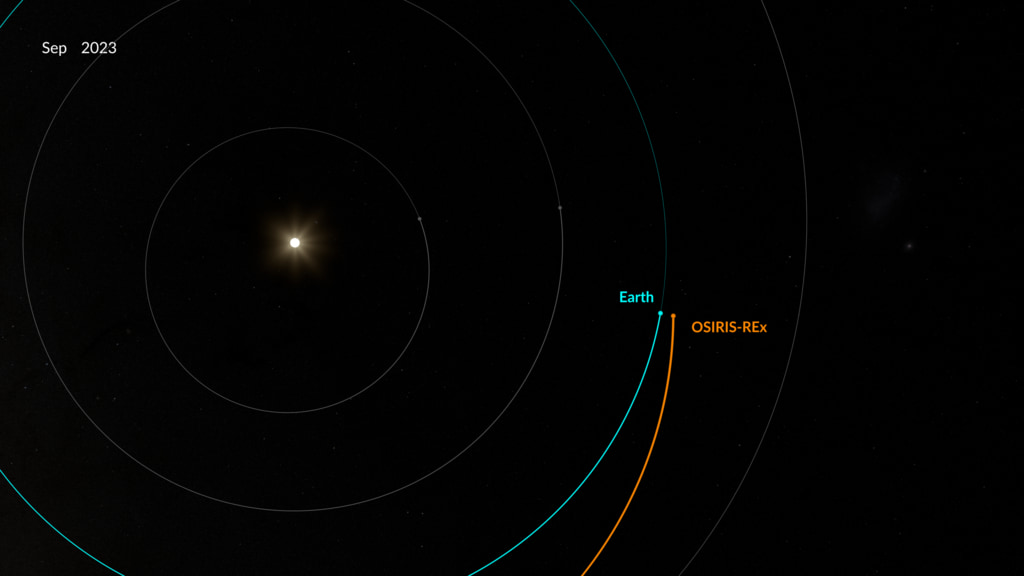
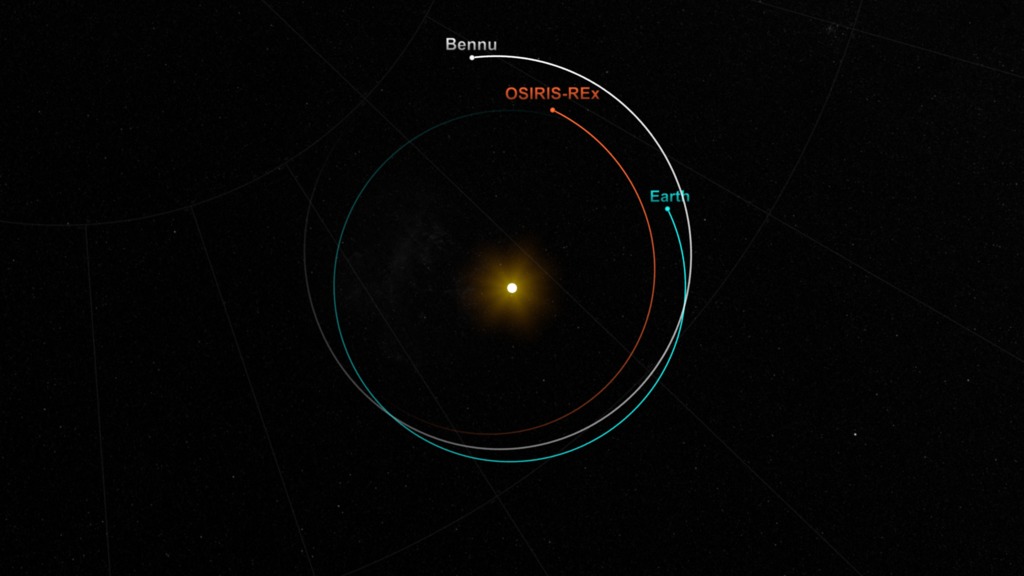
This visualization depicts the OSIRIS-REx TAG on October 20, 2020. The OSIRIS-REx satellite is represented by an orange dot and trail. The visualization begins with the satellite’s departure from orbit and continues through the checkpoint, matchpoint, TAG, and backaway maneuvers.
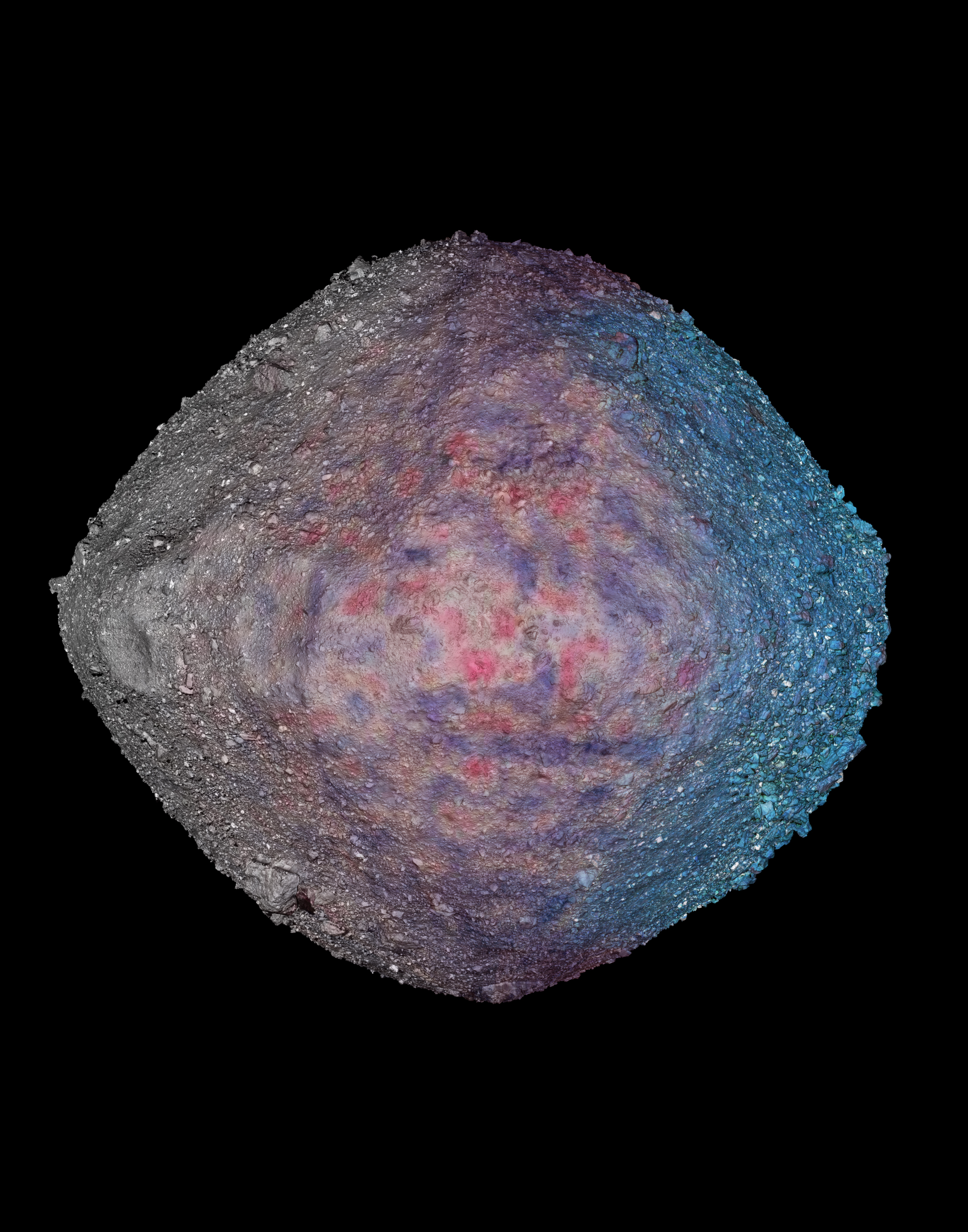
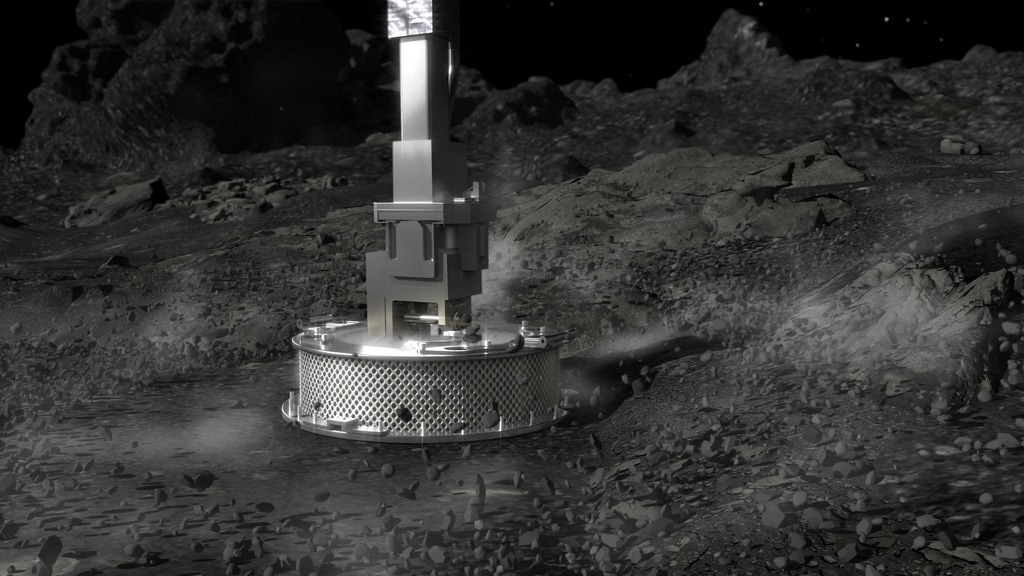
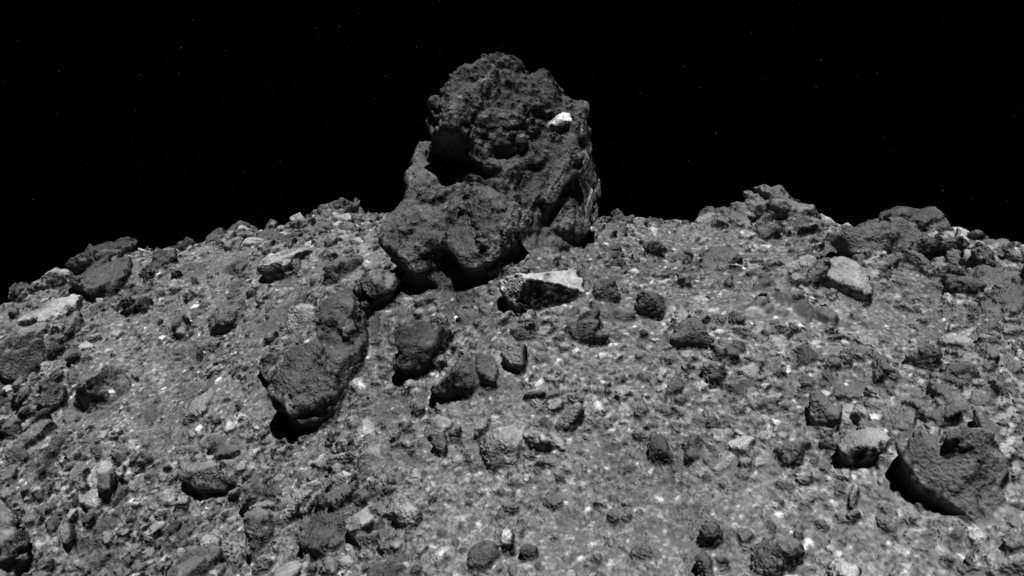
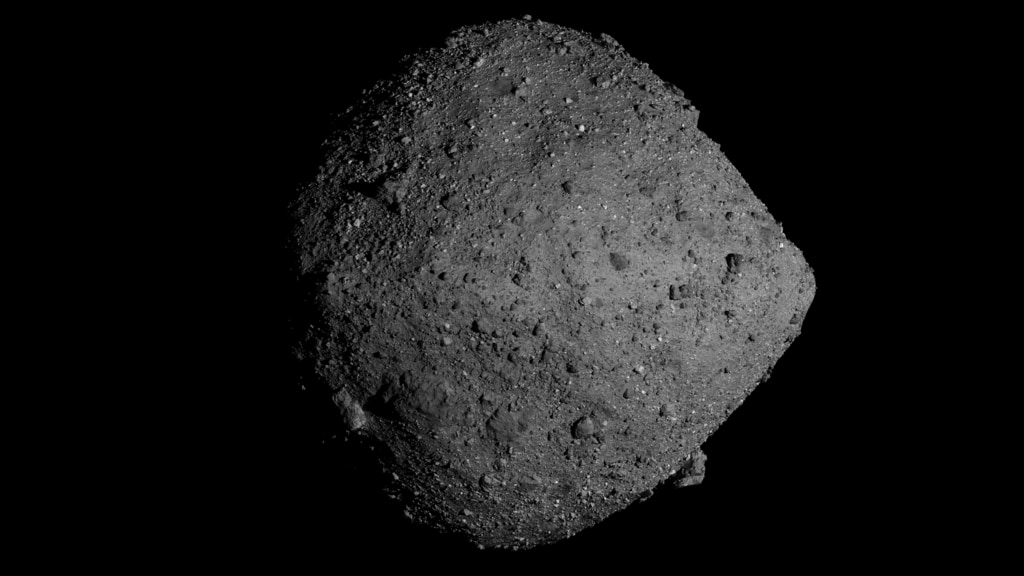
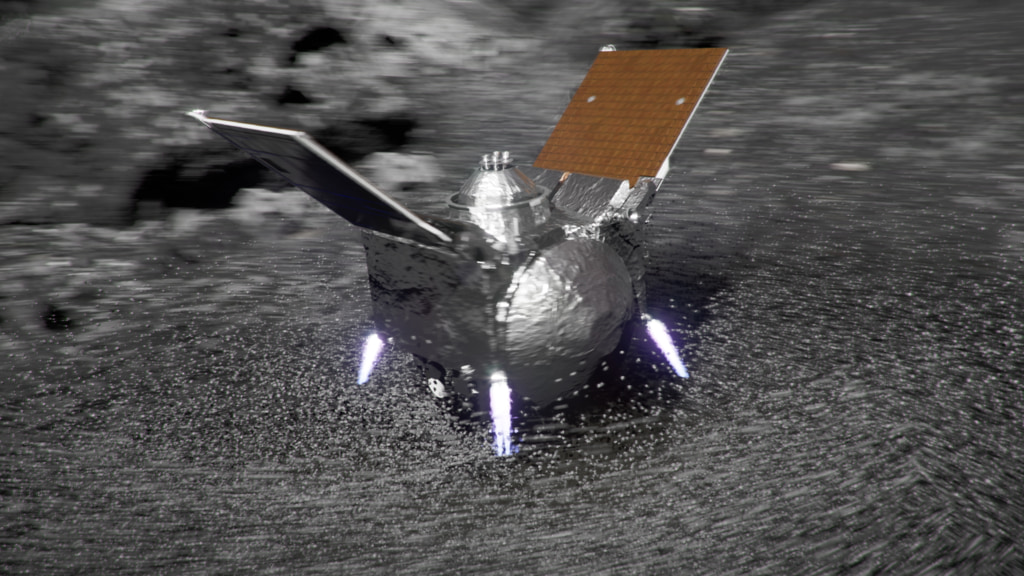
On Oct. 20, the OSIRIS-REx spacecraft will perform the first attempt of its Touch-And-Go (TAG) sample collection event. This series of maneuvers will bring the spacecraft down to site Nightingale, a rocky area 52 ft (16 m) in diameter in Bennu’s northern hemisphere, where the spacecraft’s robotic sampling arm will attempt to collect a sample. Site Nightingale was selected as the mission’s primary sample site because it holds the greatest amount of unobstructed fine-grained material, but the region is surrounded by building-sized boulders. During the sampling event, the spacecraft, which is the size of a large van, will attempt to touch down in an area that is only the size of a few parking spaces, and just a few steps away from some of these large boulders.
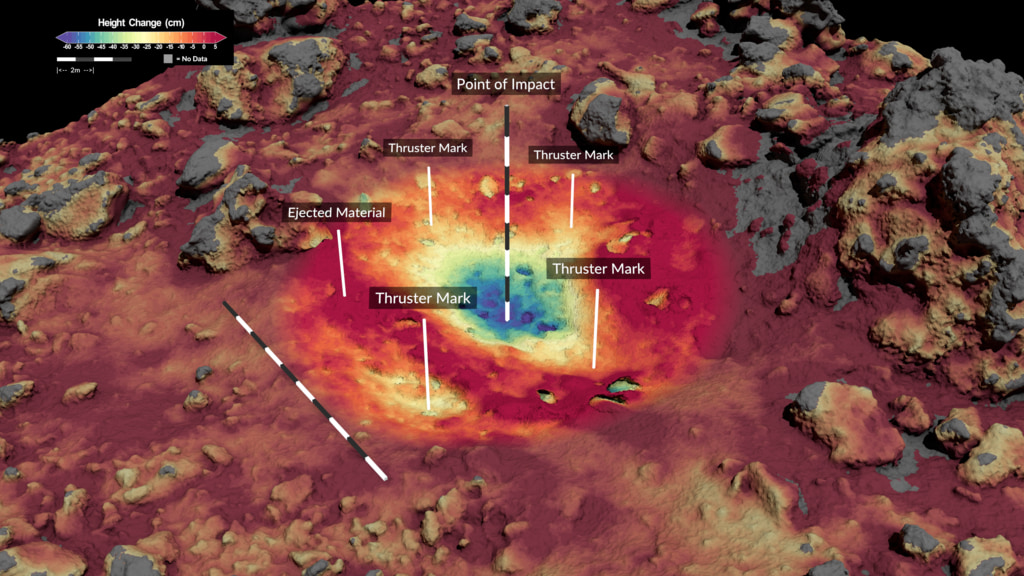
During the 4.5-hour sample collection event, the spacecraft will perform three separate maneuvers to reach the asteroid’s surface. The descent sequence begins with OSIRIS-REx firing its thrusters for an orbit departure maneuver to leave its safe-home orbit approximately 2,500 feet (770 meters) from Bennu's surface. After traveling four hours on this downward trajectory, the spacecraft performs the “Checkpoint” maneuver at an approximate altitude of 410 ft (125 m). This thruster burn adjusts OSIRIS-REx’s position and speed to descend steeply toward the surface. About 11 minutes later, the spacecraft performs the “Matchpoint” burn at an approximate altitude of 177 ft (54 m), slowing its descent and targeting a path to match the asteroid's rotation at the time of contact. The spacecraft then descends to the surface, touches down for less than sixteen seconds and fires one of its three pressurized nitrogen bottles. The gas agitates and lifts Bennu’s surface material, which is then caught in the spacecraft’s collector head. After this brief touch, OSIRIS-REx fires its thrusters to back away from Bennu’s surface and navigates to a safe distance from the asteroid.
This is a closer view of the TAG, focusing on the checkpoint, matchpoint, TAG, and backaway maneuvers. White labels appear to highlight checkpoint and matchpoint. The TAG location is indicated with a marker that changes from white to green once the TAG has occurred.
This a closer view of the TAG in a Bennu-fixed reference frame. A thin green line shows the future trajectory of OSIRIS-REx down to the TAG site. White labels appear to highlight checkpoint and matchpoint maneuvers. The TAG location is indicated with a marker that changes from white to green once the TAG has occurred.
This is a view of the TAG event from the perspective of the OSIRIS-REx spacecraft. The visualization begins with the satellite’s departure from orbit and continues through the checkpoint, matchpoint, TAG, and backaway maneuvers.
This is a view of the TAG event from the perspective of the OSIRIS-REx spacecraft. The visualization begins with the satellite’s departure from orbit and continues through the checkpoint, matchpoint, TAG, and backaway maneuvers. This version is about four times slower than the previous version and includes more of the backaway.
This is a slower view of the TAG event from the perspective of the OSIRIS-REx spacecraft. The visualization begins just after the checkpoint maneuver and continues through matchpoint, TAG, and backaway.
Credits
Please give credit for this item to:
NASA's Goddard Space Flight Center
Data provided by NASA/University of Arizona/CSA/York University/MDA.
-
Visualizer
- Kel Elkins (USRA)
-
Producer
- Dan Gallagher (USRA)
-
Writer
- Brittany Enos (The University of Arizona)
Release date
This page was originally published on Thursday, October 15, 2020.
This page was last updated on Tuesday, April 23, 2024 at 12:15 AM EDT.
Datasets used in this visualization
-
LIDAR [OSIRIS-REx: OLA]
ID: 1055The OSIRIS-REx Laser Altimeter (OLA) is a scanning LIDAR (Light Detection and Ranging). LIDAR is similar to RADAR, but it uses light instead of radio waves to measure distance. OLA emitted laser pulses at the surface of Bennu, which reflected back from the surface and returned a portion of the laser pulse to the LIDAR detector. By carefully measuring the time difference between the outgoing pulse and the incoming pulse, the distance from the spacecraft to the surface of Bennu was computed using the speed of light. This allowed OLA to provide high-resolution topographical information about Bennu during the mission.
See all pages that use this dataset -
Imagery [OSIRIS-REx: OCAMS]
ID: 1063The OSIRIS-REx Camera Suite (OCAMS) consists of three cameras: PolyCam, MapCam, and SamCam. These cameras captured a wealth of imagery during OSIRIS-REx’s time at asteroid Bennu. To help mission planners select a site on Bennu for sample collection, OCAMS provided global image mapping of the asteroid’s surface and more detailed images of potential sample sites. OCAMS also recorded the sampling event during the touch-and-go (TAG) maneuver.
Credit: NASA/University of Arizona/CSA/York University/MDA
See all pages that use this dataset
Note: While we identify the data sets used in these visualizations, we do not store any further details, nor the data sets themselves on our site.
Related
- ID: 5133
 Visualization
Visualization - ID: 5010
 Visualization
Visualization - ID: 4905
- ID: 4886
 Visualization
Visualization - ID: 20326

- ID: 20325
 Animation
Animation - ID: 4863
 Visualization
Visualization - ID: 13729
 Produced Video
Produced Video - ID: 4857
- ID: 4482
Used as a Source In
- ID: 14406
![Ride along with OSIRIS-REx during the thrilling finale of its journey to Bennu and back.Complete transcript available.Universal Production Music: “A Sense of Urgency” and “Rise to the Challenge” by Daniel Marantz and Michael James Burns, Raydia Music library [PRS]; “Fragments of Time” by Timothy Robert Shortell, Scores of Hypersonic Music [BMI]Watch this video on the NASA Goddard YouTube channel.](/vis/a010000/a014400/a014406/OSIRIS-REx_Journeys_End_Preview_V3_print.jpg) Produced Video
Produced Video - ID: 14179
 Produced Video
Produced Video - ID: 13814
 Produced Video
Produced Video - ID: 13741
 Produced Video
Produced Video